




.
.

Points Clés
- Système Matek M10Q-5883 avec GPS et QMC5883L
- Vitesse d’air numérique 4 ~ 9V
- Module de boussole pour Drone de course RC FPV
- Interface UART et I2C pour une connectivité facile
- Antenne patch 15×15 mm2 pour une performance optimale
- Compatible avec INAV, Betaflight et ArduPilot
Description du produit
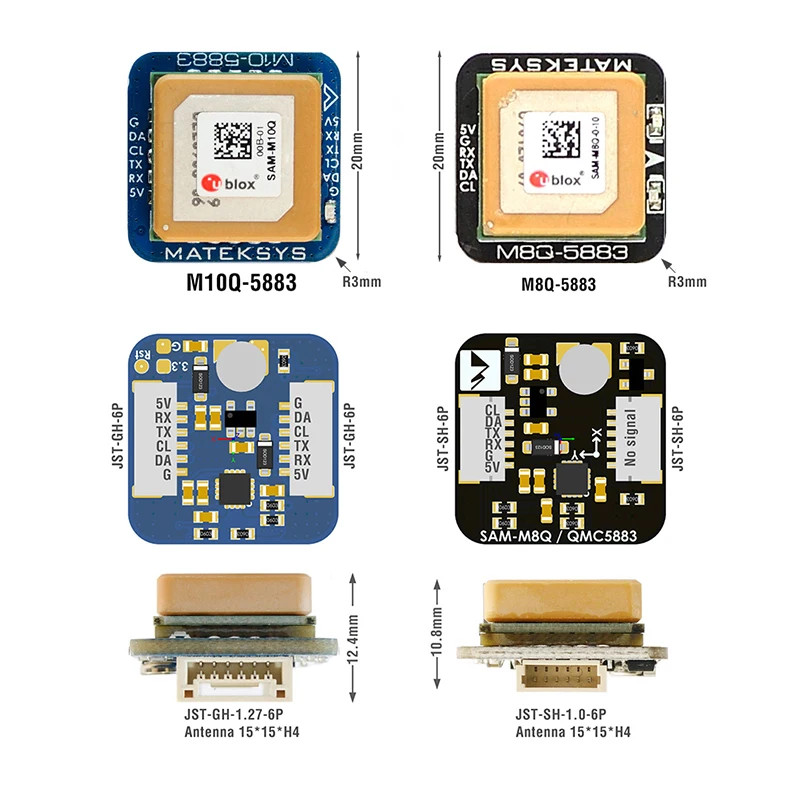
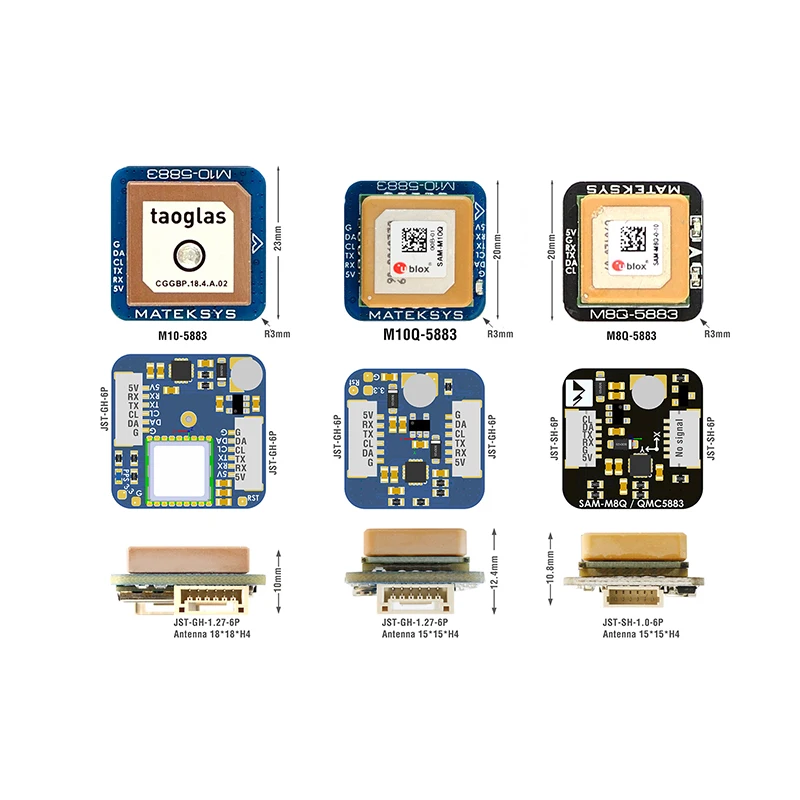
Matek Systems M10Q-5883 GPS SAM-M10Q 72 canaux & QMC5883L Digital Air Speed 4 ~ 9V avec module Compass pour RC FPV Racing Drone
M10Q-5883 utilise le module GNSS multi-constellation alimenté par SAM-M10Q-00B u-blox.
Le SAM-M10Q dispose de la plate-forme GNSS de précision standard u-blox M10 et offre une sensibilité et un temps d’acquisition exceptionnels pour tous les signaux L1 GNSS. SAM-M10Q prend en charge la réception simultanée de quatre GNSS (GPS, GLONASS, Galileo et BeiDou). Le nombre élevé de satellites visibles permet au récepteur de sélectionner les meilleurs signaux. Cela maximise la disponibilité de la position, en particulier dans des conditions difficiles telles que dans les canyons urbains profonds. La technologie u-blox Super-S (Super-Signal) offre une grande sensibilité RF et peut améliorer la précision de la position dynamique dans les scénarios sans visibilité directe.
L’antenne patch 15×15 mm2 à gain élevé offre le meilleur équilibre entre performance et petite taille. Le diagramme de rayonnement d’antenne omnidirectionnelle augmente la flexibilité pour l’installation de dispositif.
Plus de détails sur le SAM-M10Q, veuillez consulter la page SAM-M10Q u-blox
Spécifications
SAM-M10Q-00B GNSS u-blox (GPS, GLONASS, Galileo et BeiDou)
Boussole magnétique QMC5883L
Patch antenne 15*15*4mm
Plage de tension d’entrée: 4 ~ 9V (5V pad/pin)
Consommation électrique: 13mA
Baudrate UART: 9600 par défaut
Températures de fonctionnement: -20 ~ 80 °C
Interface UART(TX, RX) pour SAM-M10Q-00B GNSS
Interface I2C(DA, CL) pour boussole QMC5883L
Connecteur JST-GH-6P (SM06B-GHS-TB). Pas de 1.27mm
GNSS PPS LED, vert. (ON solide après mise sous tension, clignotant (1Hz) lorsque GNSS obtient une correction 3D)
Protocole: UBX(u-blox) 5Hz @ GPS + GAL + BDS B1C + GLO ou NMEA 1Hz
20mm * 20mm * 12.4mm
8g
M10Q-5883_step.zip
Le forfait comprend
1x M10Q-5883
1x JST-GH-6P à JST-GH-6P fil de silicium de 20cm
Câblage et réglages
M10Q-5883 5V au contrôleur de vol 4 ~ 9V
M10Q-5883 RX au contrôleur de vol UART_TX
M10Q-5883 TX au contrôleur de vol UART_RX
M10Q-5883 CL à contrôleur de vol I2C _ SCL
M10Q-5883 DA à contrôleur de vol I2C _ SDA
M10Q-5883 G au contrôleur de vol GND
Conseils et notes
Alignement de boussole (montage à plat): L’inclinaison du magnétomètre est fortement déconseillée!
INAV/BetaFLight: boussole Flèche vers l’avant, réglez CW 270 ° Flip lorsque la flèche du contrôleur de vol est tournée vers l’avant.
INAV/BetaFLight: boussole flèche vers l’arrière, réglez CW 90 ° Flip lorsque la flèche du contrôleur de vol est tournée vers l’avant.
Ardupilot/Planificateur de mission: Rotation Aucune.
Assurez-vous d’avoir une boussole/magnétomètre à 10cm des lignes électriques/ESC/moteurs/matériau à base de fer
——
INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 ou plus récent est requis.
UBlox NEO-M9N, MAX-M10S, SAM-M10Q séries tous n’ont pas dataflash intégrée. Une fois que le GNSS est éteint et
